¿Qué es el sonar y cómo funciona? ¿Quién inventó el sonar? Desarrollo e historia del sonar, principio de funcionamiento del sonar.
La Historia del Sonar
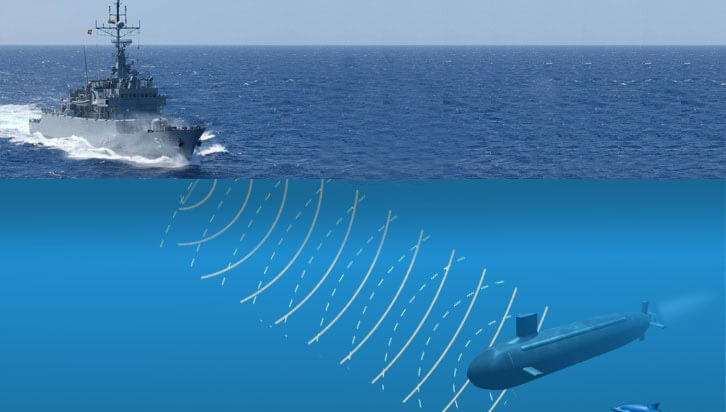
Sonar es un sistema que utiliza ondas de sonido submarinas transmitidas y reflejadas para detectar y localizar objetos sumergidos o para medir distancias bajo el agua. Se ha utilizado para la detección de submarinos y minas, detección de profundidad, pesca comercial, seguridad de buceo y comunicación en el mar.
El dispositivo Sonar enviará una onda de sonido subsuperficial y luego escuchará los ecos de retorno. Los datos de sonido se transmiten a los operadores humanos por medio de un altavoz o a través de una pantalla en un monitor.
Los inventores
Ya en 1822, Daniel Colloden usó una campana submarina para calcular la velocidad del sonido bajo el agua en el lago Ginebra, Suiza. Esta investigación inicial condujo a la invención de dispositivos de sonar dedicados por otros inventores.
Lewis Nixon inventó el primer dispositivo de escucha de tipo Sonar en 1906 como una forma de detectar los icebergs. El interés por el Sonar aumentó durante la Primera Guerra Mundial cuando era necesario poder detectar submarinos.
En 1915, Paul Langévin inventó el primer dispositivo de tipo sonar para detectar submarinos llamado «ecolocación para detectar submarinos» utilizando las propiedades piezoeléctricas del cuarzo. Su invento llegó demasiado tarde para ayudar mucho con el esfuerzo de guerra, aunque el trabajo de Langévin tuvo una gran influencia en los futuros diseños de sonar.
Los primeros dispositivos de Sonar fueron dispositivos de escucha pasiva, lo que significa que no se enviaron señales. En 1918, tanto Gran Bretaña como los EE. UU. Habían construido sistemas activos (en Sonar activo, las señales se envían y luego se devuelven). Los sistemas de comunicación acústica son dispositivos de Sonar donde hay un proyector y un receptor de ondas de sonido en ambos lados de la ruta de la señal. Fue la invención del transductor acústico y los proyectores acústicos eficientes lo que hizo posible formas más avanzadas de Sonar.
Sonar – sonido, NAvigation, y rango
La palabra Sonar es un término estadounidense utilizado por primera vez en la Segunda Guerra Mundial. Es un acrónimo de SOUND, NAvigation, and Ranging. Los británicos también llaman a Sonar «ASDICS», que significa Comité de Investigación de Detección Antisubmarina. Los desarrollos posteriores de Sonar incluyeron la sonda de eco o el detector de profundidad, el sonar de barrido rápido, el sonar de barrido lateral y el sonar WPESS (barrido dentro del sector electro pulso).
Dos tipos principales de sonar
El sonar activo crea un pulso de sonido, a menudo llamado «ping» y luego escucha los reflejos del pulso. El pulso puede ser a una frecuencia constante o un chirrido de frecuencia cambiante. Si es un chirrido, el receptor correlaciona la frecuencia de las reflexiones con el chirrido conocido. La ganancia de procesamiento resultante permite al receptor obtener la misma información que si se emitiera un pulso mucho más corto con la misma potencia total.
En general, los sonares activos de larga distancia utilizan frecuencias más bajas. El más bajo tiene un sonido bajo «BAH-WONG». Para medir la distancia a un objeto, uno mide el tiempo desde la emisión de un pulso hasta la recepción.
Los sonares pasivos escuchan sin transmitir. Suelen ser militares, aunque algunos son científicos. Los sistemas de sonar pasivos suelen tener grandes bases de datos sonoras. Un sistema informático utiliza con frecuencia estas bases de datos para identificar clases de barcos, acciones (es decir, la velocidad de un barco o el tipo de arma lanzada) e incluso barcos particulares.



